排查步骤讲解(内部知晓):
知识库:【C6C无极版3MP 自定义巡航功能逻辑】
排查话术 (可外发):
(1)最多设置4个自定义巡航点
(2)巡航点设置后,摄像头将在巡航点之间水平往返巡航,每个点位停留6秒,转动往返顺序为:A-B-C-D-C-B-A
(3)如果只设置1个巡航点位,则在设置时间段内(即巡航计划时间段)云台会固定在这个点
(4)自定义巡航点位无法单个删除,如果想要重新设置某个巡航点位,需要将所有的巡航点位重置后,重新设置
(5)设备恢复出厂后,自定义巡航点位会被删除
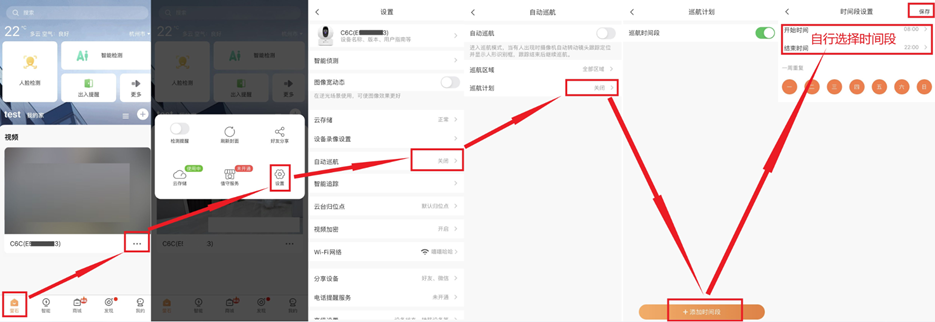
(6)自定义巡航时间段,最多添加4个巡航时间段计划